March 22, 2016
Research Highlight
Algorithms for Underwater Exploration
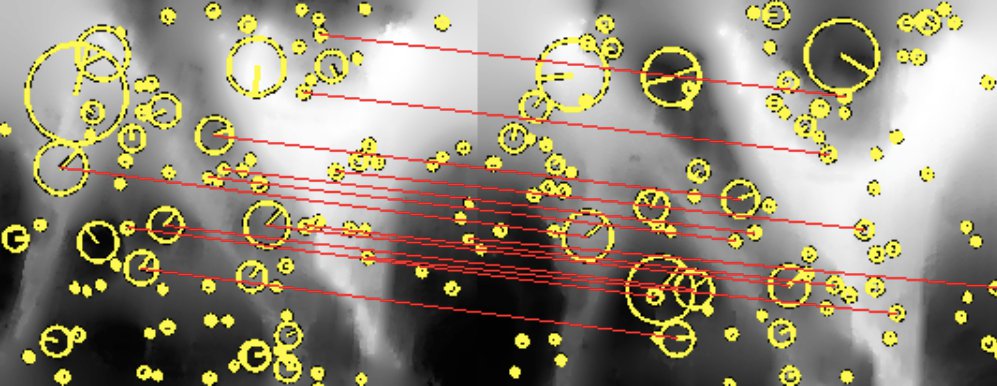
Matching features between two successive passes along the Soquel Canyon wall. The features are shown as yellow circles and matching features are connected in red. There are sufficient correspondences to declare an image match.Image credit: Hammond et. al. (2015).
Researchers have presented a new algorithm that could help automated vehicles explore locations like the underside of icebergs and underwater canyons. Automated exploration under icebergs can be difficult because iceberg features shift as they drift through the water. The method could help vehicles identify corresponding features between two images over time, helping the vehicle identify its position in relation to the surrounding environment. The method could be applied to any mapping task where drift occurs over long-duration missions.
Experiments for the study were performed using data from the exploration of Soquel Canyon in Monterey Bay, California. Motivation for the work came from a NASAASTEP-funded mission to map free-drifting icebergs as part of a larger goal to explore and search for life in extreme environments.
The study, “Automated Point Cloud Correspondence Detection for Underwater Mapping Using AUVs,” was presented at the conference OCEANS ’15, held on October 19-22nd in Washington, DC. The research was supported in part by the Astrobiology Science and Technology for Exploring Planets (ASTEP) element of the NASA Astrobiology Program. ASTEP was an active program element from 2001 to 2014 and supported investigations focused on exploring Earth’s extreme environments to learn how best to search for life on other planets. The types of projects that were funded by ASTEP are now competed under Planetary Science and Technology from Analog Research (PSTAR).